Problem We Solve

Military bases, government facilities, and other fixed-site locations need a way to protect against the threat of signal jamming and spoofing. Because GNSS signals are relatively weak once they reach the surface of the Earth, they can be easily manipulated. Adversaries can turn low-cost SDRs into GPS jammers and spoofers. They then can turn around and use those devices to disrupt operations and emit fake satellite signals.
Defense agencies – whether operating on land, air, or sea – need ways to detect and mitigate these satellite signal threats in order to ensure the continued operation of mission-critical equipment, such as radar, communications, missile defense and more.
A solution to jamming and spoofing can range from anti-jam antennas and add-on devices, to GPS threat detection sensors and even embedded software that protects critical infrastructure.
Why it is Important
Navigation warfare – and more broadly, electronic warfare – is becoming an increasing threat on the 21st century battlefield. Soldiers and command and control centers rely on essential GNSS signals for communication, weapon defense systems, and knowledge on the ground. Sometimes these signals can be compromised in 2 ways:
- An adversary blocks the ability of the warfighter to use satellite signals for their equipment, thus causing a loss of communications and radar.
- An adversary leverages the GNSS signals to learn something about the warfighter, and their location or movement.
To be effective and ensure the safety of personnel, military leaders need to reliably and efficiently detect GNSS Signal threats and mitigate them in real time.
How We Solve it
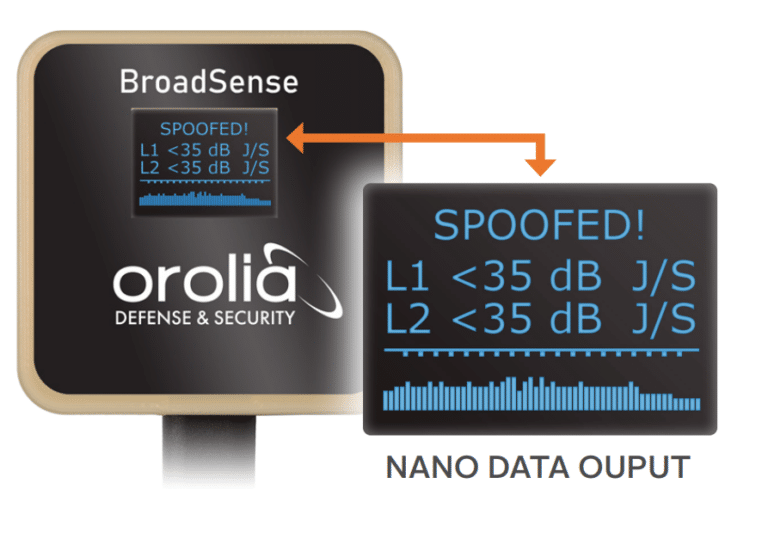
If you have a system that relies on GPS satellite signals and you need a way to real-time situational awareness data, the BroadSense sensor can detect when the GPS signal or GPS spectrum is compromised. It provides real-time signal threats through a convenient visual data output screen. And its small form factor (41 x 41 x 19mm) enables you to easily install it with an already built out system.
Applications of GPS Jamming & Spoofing Detection Sensor:
- UAV platforms
- Dismounted Warfighters
- Cell Towers
- Any environment that is contested (i.e. potential adversarial threats).

If you have a timing device or any other electronic equipment that relies on GNSS signals inside a mission-critical datacenter, you can install BroadShield software to detect jamming and spoofing. BroadShield’s patented algorithms immediately report disruptions to the user interface and can also mitigate the interference and/or fake satellite signals.
Applications For Anti-Jam & Anti-Spoofing Software:
- Radar
- Communications
- Timing Servers
- Datacenters

Sometimes the most straight-forward solution is the best. The 8230AJ GPS/GNSS Anti-Jam Outdoor Antenna is a high gain (40 dB) GNSS outdoor antenna. The Anti-Jam antenna rejects signals for the lower-elevation angles – where most of the interference comes from. It uses a 3-stage low noise amplifier, a mid-section SAW, and a tight pre filter to protect against saturation by high level sub-harmonics and L-band signals.

The GPSdome Anti-Jammer ensures continuity of autonomous navigation and operation during jamming conditions. Its small form factor is ideal for mobile and or UAV applications. With GPSdome’s protection, any military system immediately becomes more robust and protected against wireless attacks.
Why Choose Us
- Field-Proven – BroadSense & BroadShield detection algorithms have been rigorously tested for over 10 years.
- Low SWAP – The anti-jam antennas and add-on devices are smaller than the palm of your hand and weigh less than 150 grams.
- Patented Algorithms – The embedded anti spoofing and anti jamming software library consists of many patented algorithms designed to interference and anomalies within the GPS signal and the GPS spectrum and then automatically report the disruption to the PNT system interface.
- Rugged – The anti jam antennas and add-ons are designed for harsh environments (IP67 rated).
- Robust – Both the anti-jam / anti-spoof software as well as the anti-jam antennas and sensors are designed to provide a signal shield in GPS-denied environments or in contested environments that are highly volatile.